15 Hidden Markov Models
Filtering or monitoring, is the task of tracking the distribution Bt(X) = Pt(Xt|e1..t) over time.
We start with B1(X) in an initial setting, usually uniform.
As time passes, or we get observations, we update B(X)
The Kalman filter was invented in the 60's and first implemented as a method of trajectory estimation for the Apollo program.
HMM是用来找到某一个事件发生的概率,在很多evidence的情况下:
例如grad学生要知道第五天是晴天还是雨天,然后根据前4天的天气情况和前5天教授带伞的情况,可以推出第五天天气的概率。
Hidden Markov Models



基本的HMM例子。
推倒公式与过程 Filtering Monitoring





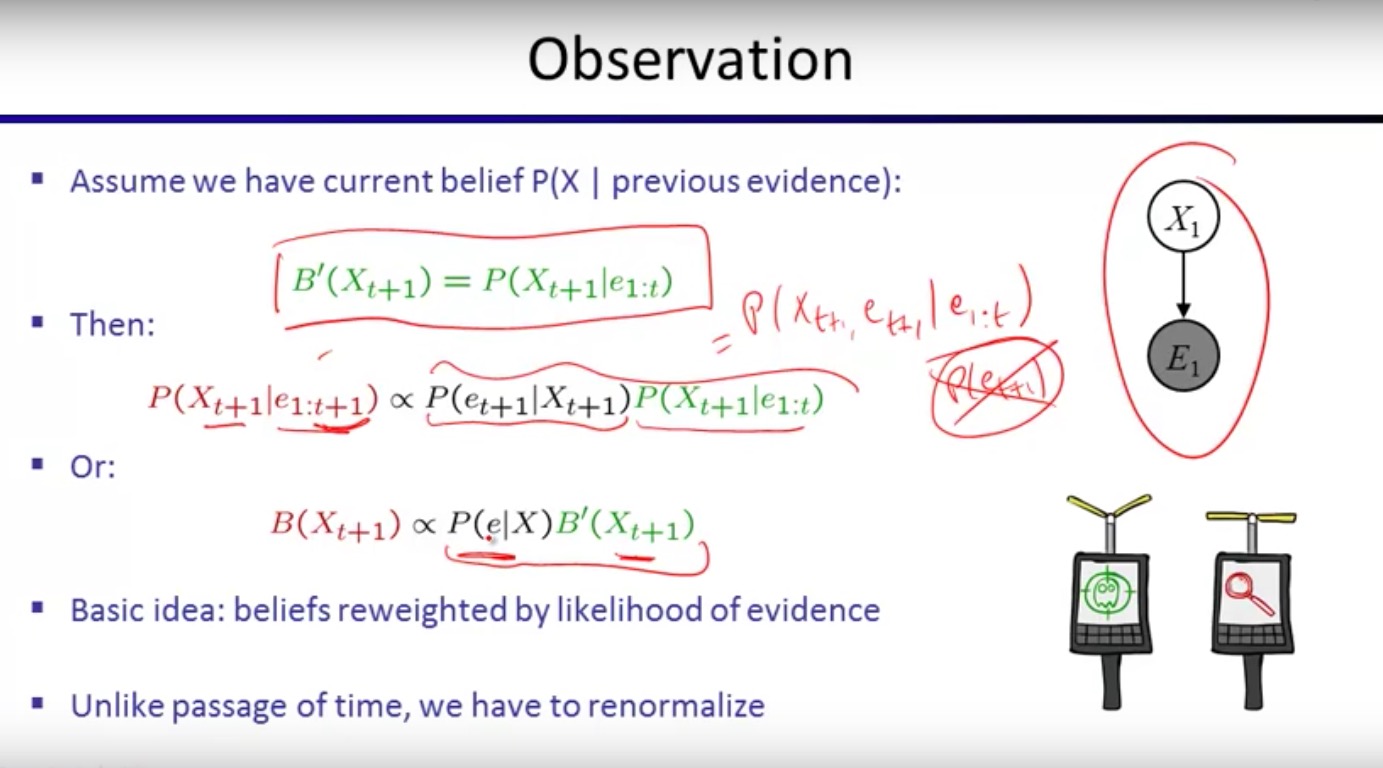
The forward algorithm

